
Специализация
Предприятие ООО НТО «Терси-КБ» специализируется на разработке, производстве и внедрении систем автоматизации для нефтяной, газовой и химической промышленности, сетей тепло-, […]
Предприятие ООО НТО «Терси-КБ» специализируется на разработке, производстве и внедрении систем автоматизации для нефтяной, газовой и химической промышленности, сетей тепло-, […]

За более чем 25-летнюю историю деятельности предприятия были выполнены десятки внедрений АСУ ТП. В большинстве проектов в системах используется несколько
Подавляющее большинство обзоров SCADA систем посвящены описаниюих функций или красоте интерфейса оператора. И практически никто не затрагивает вопросы удобства работы
Каскад-САУ – удобная SoftLogic/SCADA система Читать дальше

Научно-техническое общество «Территориальные системы» создано в 1995г. группой руководителей и специалистов в области автоматизации — сотрудников предприятий оборонного комплекса г.Саров
С 1998 года НТО «Терси-КБ» занимается созданием, модернизацией и ремонтом систем автоматики для ОАО «Верхневолжскнефтепровод». Сотрудничество началось с создания автоматизированной
Автоматизация систем «Транснефть-Верхняя Волга» Читать дальше

В статье рассматривается АСУ ТП производства поливинилхлорида. Описываются функциональные возможности системы, технические характеристики, структура иназначение аппаратно-программных средств. Представлены решения, направленные
Автоматизация производства смолы ПВХ на заводе «Капролактам» Читать дальше

В статье рассматривается система диспетчерского контроля и управления объектами телемеханики городской газораспределительной сети. Описываются технические характеристики, структура аппаратных средств, состав
Система автоматизации городской газораспределительной сети. Читать дальше

В статье рассматривается вариант построения системы автоматизации,состоящей из независимых подсистем противоаварийной защиты и автоматизированного управления. Представлены функциональные возможности системы, технические
Автоматизация эстакады налива жидкого аммиака в железнодорожные цистерны Читать дальше

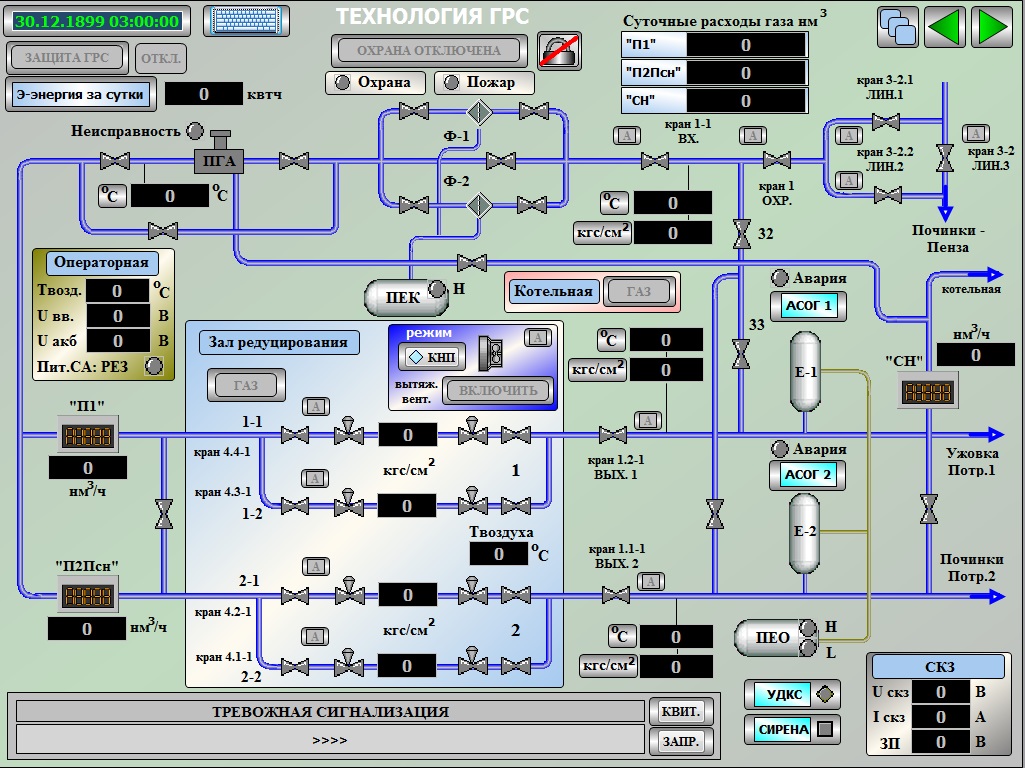
В статье рассматривается система, состоящая из локальных систем автоматизации газораспределительных станций, объединённых системой диспетчерского контроля и управления. Описываются технические характеристики,
Автоматизация сети газораспределительных станций Читать дальше

Производимая предприятием продукция постоянно модернизируется, появляются новые подходы к созданию архитектуры аппаратного обеспечения, что приводит к упрощению создания на этой
Снятые с производства Читать дальше